1、天線控制系統

1) 主要功能
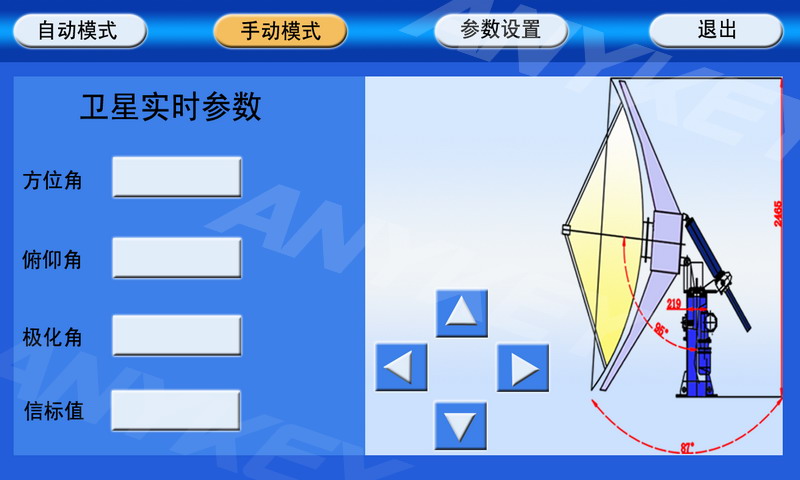
◇ 天線實時位置顯示:ACU�����根據天線方位、俯仰和極化軸的位置,進行角度編碼,并把方位、俯仰和極化角度顯示在觸控屏上,在觸控屏上可以實時查看天線姿態
◇ 手動控制:通過ACU面板上觸摸屏的控制,可使天線在順時針(cw)、逆時針(ccw)、上抬(up)或下俯(down)方向上轉動;
◇位置指定:ACU�������既可根據所指定的衛星代號使天線自動轉向目標,又可在當前指向的基礎上,根據輸入的角度偏移量,使天線偏移一定的角度后自動停止;
◇步進跟蹤:ACU可根據跟蹤接收機提供的信號電平的大小,使天線自動跟蹤目標;
◇線極化/圓極化轉換:一鍵切換線極化/圓極化狀態;
◇極化面調整:通過ACU面板觸摸屏調整線極化極化角;
◇參數設置:用戶通過面板上的觸摸屏,按照ACU提供的菜單,可輸入和修改各種工作參數。

◇雙速驅動:采用三相交流變頻調速器實現方位俯仰的雙速驅動;天線可380V動力供電,也可以220V供電,適合各種供電環境。
◇控保裝置:在方位、俯仰和極化運動范圍極限位置處設有限位開 關,天線到達限位位置時停轉并顯示,此時只能使天線反向運動;在PDU箱體上設有急停開關,在緊急情況下,可迅速控制天線停轉;
◇分控及遠控功能:PDU具有本地控制天線運動的分控功能和由ACU遠控功能。
2) 技術指標
|
角度顯示范圍
|
方位和俯仰
|
0°~ 359.99°
|
|
極化
|
0°~ 359.9°
|
|
角度顯示分辨率
|
方位和俯仰
|
0.01°
|
|
極化
|
0.1°
|
|
角度顯示精度
|
方位和俯仰
|
±0.01 °
|
|
極化
|
0.1°
|
|
跟蹤精度
|
1/10 接收波束寬度
|
|
|
預置星數
|
10顆衛星
|
|
|
驅動方式
|
方位和俯仰
|
三相交流變速及恒速
|
|
極化
|
單相交流恒速
|
|
驅動功率
|
方位和俯仰
|
500W
|
|
極化
|
0.2KW
|
|
環境適應能力
|
室內
|
溫度: +10℃~+30℃
|
|
濕度: 90%(25℃)
|
|
室外
|
溫度:-25℃~+45℃
|
|
濕度: 98%(25℃)
|
|
交流電源
|
電壓
|
ACU 220V±10%
|
|
PDU380V±10% 三相五線
|
|
頻率
|
50Hz
|
3、跟蹤接收機
1) 功能
該型號設備為步進跟蹤接收機,它的任務是接收來自天線的信標信號,并將此信號進行放大、變頻、鎖相、對數檢波,輸出一
個只與輸入信號強度成正比的直流電壓,饋送給伺服系統,以驅動天線跟蹤目標。
|
輸入電平
|
-80dBm~-40 dBm
|
|
輸入阻抗
|
50Ω
|
|
輸入頻(70MHz)
|
69.1 MHz~70.9MHz(±200KHz)
|
|
69.5 MHz~70.5MHz(±600KHz)
|
|
輸入頻率(L波段)
|
950MHz~1750MHz(±250KHz)
|
|
頻率捕獲范圍
|
窄帶:±200KHz
|
|
寬帶:±600KHz
|
|
頻率步進
|
5KHz
|
|
捕獲時間
|
≤800ms (±200KHz)
|
|
≤3s (±600KHz)
|
|
輸入駐波
|
≤1.5:1
|
|
輸出直流電壓
|
范圍:0~10v
|
|
線性 ≤20%
|
|
輸出直流電壓斜率
|
0.16V/dB
|
|
環境條件
|
工作溫度:-20℃~+60℃
|
|
儲存溫度:-30℃~+70℃
|
|
濕度: 20%~85%
|
|
平均維修時間
|
0.5小時(單機)
|
|
機箱尺寸
|
標準19英寸,1U機箱
|
